3D-MOS
This is our implementation of the 3D Multi-Object Search (3D-MOS) domain modeled as a POMDP as well as the Multi-Resolution POUCT planning algorithm proposed in our paper Multi-Resolution POMDP Planning for Multi-Object Search in 3D (IROS 2021). IROS RobotCup Best Paper Award.
- Website: https://zkytony.github.io/3D-MOS/
- ArXiv: https://arxiv.org/abs/2005.02878
- PDF: https://arxiv.org/pdf/2005.02878.pdf
- Github: https://github.com/zkytony/3D-MOS
- Robot demo: https://www.youtube.com/watch?v=oo-wrL0ta6k
- Blog https://h2r.cs.brown.edu/object-search-in-3d/
Demo
Talk
Overview
Robots operating in human spaces must find objects such as glasses, books, or cleaning supplies that could be on the floor, shelves, or tables. This search space is naturally 3D.
When multiple objects must be searched for, such as a cup and a mobile phone, an intuitive strategy is to first hypothesize likely search regions for each target object based on semantic knowledge or past experience, then search carefully within those regions by moving the robot’s camera around the 3D environment. To be successful, it is essential for the robot to produce an efficient search policy within a designated search region under limited field of view (FOV), where target objects could be partially or completely blocked by other objects. In this work, we consider the problem setting where a robot must search for multiple objects in a search region by actively moving its camera, with as few steps as possible.
Searching for objects in a large search region requires acting over long horizons under various sources of uncertainty in a partially observable environment. For this reason, previous works have used Partially Observable Markov Decision Process (POMDP) as a principled decision-theoretic framework for object search. However, to ensure the POMDP is manageable to solve, previous works reduce the search space or robot mobility to 2D, although objects exist in rich 3D environments. The key challenges lie in the intractability of maintaining exact belief due to large state space, and the high branching factor for planning due to large observation space.
In this paper, we present a POMDP formulation for multi-object search in a 3D region with a frustum-shaped field-of-view. To efficiently solve this POMDP, we propose a multi-resolution planning algorithm based on online Monte-Carlo tree search. In this approach, we design a novel octree-based belief representation to capture uncertainty of the target objects at different resolution levels, then derive abstract POMDPs at lower resolutions with dramatically smaller state and observation spaces.
Evaluation in a simulated 3D domain shows that our approach finds objects more efficiently and successfully compared to a set of baselines without resolution hierarchy in larger instances under the same computational requirement.
Finally, we demonstrate our approach on a torso-actuated mobile robot in a lab environment. The robot finds 3 out of 6 objects placed at different heights in two 10m2 x 2m2 regions in around 15 minutes.
Installation
The required python version is Python 3.6+.
-
Clone the repository and create and virtual environment with the following lines.
git clone git@github.com:zkytony/3D-MOS.git cd 3D-MOS; virtualenv -p python3 venv/mos3d source venv/mos3d/bin/activate -
Install pomdp-py
pip install pomdp-py==1.2.4.5(Future
pomdp-pyversions are expected to be applicable too.) -
Install the
mos3dpackage. Assume you're at the root of the repository.pip install -e .
System requirements
We have only worked on this project using Ubuntu 16.04 and 18.04. It is likely working on 20.04. It may or may not work on Windows or Mac. Because the simulator uses PyOpenGL, the system is expected to have OpenGL available. The version we last tested on is:
$ glxinfo | grep "OpenGL version"
OpenGL version string: 4.6.0 NVIDIA 465.19.01
If you are using Ubuntu on a desktop computer, then you will most likely have OpenGL.
Test
There are four tests you can run.
cd tests/
python test_models.py
python test_octree_belief.py
python test_sensor.py
python test_abstraction.py
Expected output: test_models.py
$ python test_models.py
pygame 2.0.1 (SDL 2.0.14, Python 3.8.10)
Hello from the pygame community. https://www.pygame.org/contribute.html
**N OBJ: 1 **
[10/10]
[10/10]
[10/10]
[10/10]
[10/10]
**N OBJ: 2 **
[10/10]
[10/10]
...
**N OBJ: 7 **
[10/10]
[10/10]
[10/10]
[10/10]
[10/10]
Then a plot will be shown that looks similar to:
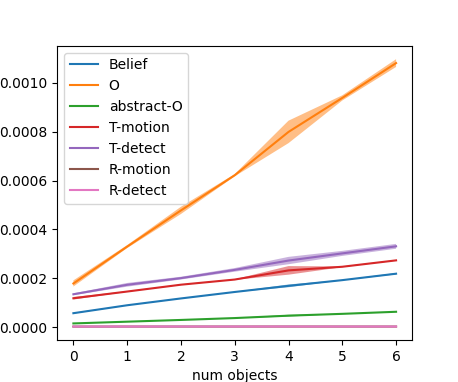
If there is a warning about "Gimbal lock", please ignore it.
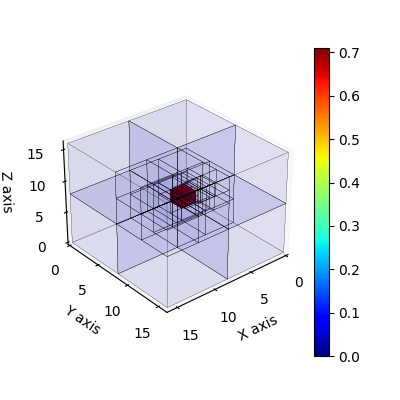
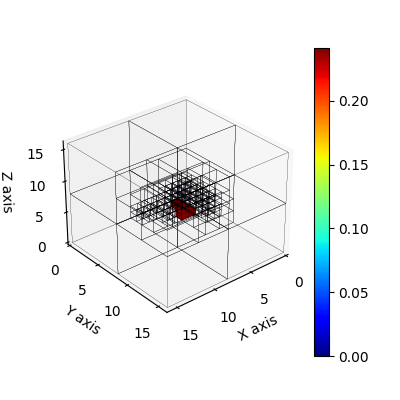
Expected output: test_octree_belief.py
$ python test_octree_belief.py
pygame 2.0.1 (SDL 2.0.14, Python 3.8.10)
Hello from the pygame community. https://www.pygame.org/contribute.html
** Testing Basics
0.000244140625
0.001953125
0.015625
0.125
1.0
0.9606609347230894
...
** Testing belief update
orange_ricky(3, 2, 3)
0.08877840909090909
Observation({(2, 0, 2): (2, 0, 2, free), (0, 1, 0): (0, 1, 0, unknown), .... # a huge list
orange_ricky(2, 1, 0)
0.24153830881598135
Avg sample time (res=1): 0.099
Avg sample time (res=2): 0.062
Avg sample time (res=4): 0.039
Two plots will be shown along the way that look like:
Expected output: test_sensor.py
$ python test_sensor.py
pygame 2.0.1 (SDL 2.0.14, Python 3.8.10)
Hello from the pygame community. https://www.pygame.org/contribute.html
Passed.
1.5707963267948966
2.00, 2.00
20.00, 20.00
When depth=4, field of view volume contains 19 voxels
When depth=5, field of view volume contains 44 voxels
When depth=6, field of view volume contains 69 voxels
When depth=7, field of view volume contains 118 voxels
...
World 4x4x4:
In a world of dimensions 4x4x4, d=4 takes up 0.172
In a world of dimensions 4x4x4, d=5 takes up 0.312
In a world of dimensions 4x4x4, d=6 takes up 0.703
...
World 8x8x8:
In a world of dimensions 8x8x8, d=4 takes up 0.021
**** recommended setting (2\%) for 8x8x8: 4 ****
In a world of dimensions 8x8x8, d=5 takes up 0.039
In a world of dimensions 8x8x8, d=6 takes up 0.088
...
# up to 128x128x128
Expected output: test_abstraction.py
This is basically an example for running plannings in simulated 3D grid worlds.
The test contains several trials:
# under __main__
test_planner(worldocc_small, "flat", "state_action_abstraction")
test_planner(worldocc_small, "multires", "state_action_abstraction")
test_planner(worldocc, "multires", "state_action_abstraction")
test_planner(world32, "multires", "state_action_abstraction")
test_planner(random_worldstr, "multires", "state_action_abstraction")
Here, worldocc_small, world_occ, world32, random_worldstr are string specifications
of the 3D grid world. multires or flat are the planning algorithms, and state_action_abstraction
is the type of test to perform.
The following shows a visualization with a randomly generated 8x8x8 world:
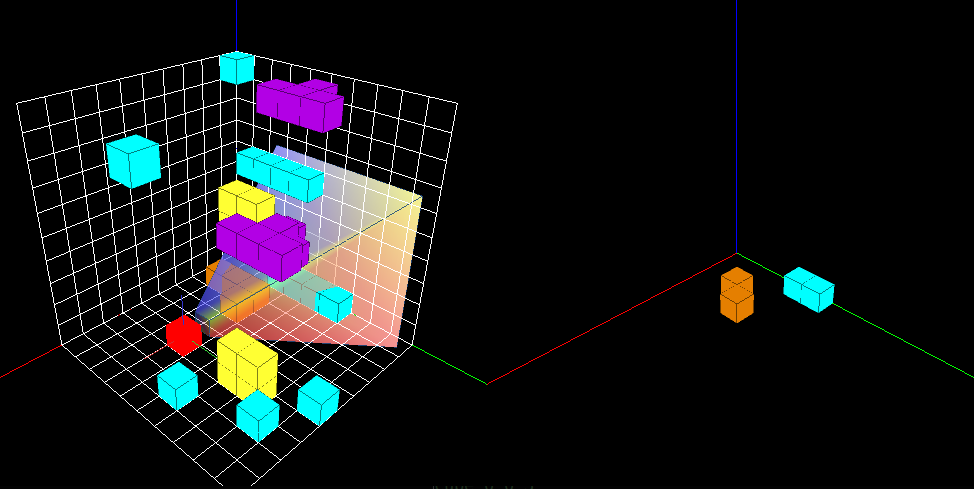
The following shows a visualization with a 4x4x4 world with an occluded target object (behind the gray obstacles):
Experiment Results
You can download the experiment results here:
- Scalability.zip (1.18GB)
- Quality.zip (170.9MB)
After download, unzip each so that the output directory is placed under mos3d/experiments/results.
Each zip file contains a collection of trials for the experiment.
The folder for each trial contains files including:
- config.yaml: Configuration for that trial
- log.txt: Readable log of trial execution
- history.pkl: A sequence of (action, observation) pairs experienced by the agent in that trial
- states.pkl: A sequence of states of the environment
- rewards.yaml: reward obtained at each step
- trial.pkl: an object that inherits
sciex.Trialwhich was used for running the trial.
You can replay a trial using the replay.py script. To do this,
you need to first install sciex:
pip install sciex==0.2
Then,
$ cd mos3d/experiments
$ python replay.py
pygame 2.0.1 (SDL 2.0.14, Python 3.8.10)
Hello from the pygame community. https://www.pygame.org/contribute.html
Quality [q] or Scalability [s]? s
...
[3650] domain(8-6-6-10-3.0-500-240)_943414_purelyrandom-octree-uniform
[3651] domain(8-6-6-10-3.0-500-240)_959799_bruteforce-octree-uniform
[3652] domain(8-6-6-10-3.0-500-240)_959799_hierarchical-octree-uniform
[3653] domain(8-6-6-10-3.0-500-240)_959799_options-octree-uniform
[3654] domain(8-6-6-10-3.0-500-240)_959799_pomcp-particles-uniform
[3655] domain(8-6-6-10-3.0-500-240)_959799_porollout-octree-uniform
[3656] domain(8-6-6-10-3.0-500-240)_959799_pouct-octree-uniform
[3657] domain(8-6-6-10-3.0-500-240)_959799_purelyrandom-octree-uniform
Which trial [1-3657] ? 3652
Then the trial 3652 will replay and you will see a visualization of the environment. Replay a different trial by entering the corresponding index.
Hardware Spec
When conducting the experiments, we equally divided the trials to be completed on four computers in our lab with Intel i7 CPUs.
Intel(R) Core(TM) i7-9700K CPU @ 3.60GHz
Intel(R) Core(TM) i7-5930K CPU @ 3.50GHz
Intel(R) Core(TM) i7-5930K CPU @ 3.50GHz
Intel(R) Core(TM) i7-8700 CPU @ 3.20GHz
Citation
If you find 3D-MOS helpful to your research, please consider citing the following paper:
@inproceedings{zheng2020multi,
title={Multi-Resolution {POMDP} Planning for Multi-Object Search in {3D}},
booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
author={Zheng, Kaiyu and Sung, Yoonchang and Konidaris, George and Tellex, Stefanie},
year={2021}
}
People
- Kaiyu Zheng (Brown University)
- Yoonchang Sung (MIT CSAIL)
- George Konidaris (Brown University)
- Stefanie Tellex (Brown University)